カメラのオートフォーカスについて
カメラのオートフォーカス システムは、カメラ レンズをインテリジェントに調整して被写体にピントを合わせます。これは、鮮明な写真と逃した機会の違いを意味します。焦点のシャープさという一見単純な目標にもかかわらず、カメラが焦点を合わせる方法の内部の仕組みは、残念ながらそれほど単純ではありません。このチュートリアルは、オートフォーカスの仕組みを紹介することで写真を改善することを目的としています。これにより、その資産を最大限に活用し、欠点を回避できるようになります。
注:オートフォーカス (AF) は、カメラ内のコントラスト センサー (パッシブ AF) を使用して動作します。 ) または信号を発信して被写体を照らすか、被写体までの距離を推定する (アクティブ AF )。パッシブ AF は、コントラスト検出のいずれかを使用して実行できます または位相検出 どちらの方法も正確なオートフォーカスを達成するためにコントラストに依存しています。したがって、この AF チュートリアルでは、これらは質的に類似しているものとして扱われます。特に明記しない限り、このチュートリアルではパッシブオートフォーカスを想定しています。最後にアクティブオートフォーカスのAF補助光方式についても説明します。
コンセプト:オートフォーカス センサー
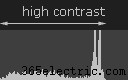
カメラのオートフォーカス センサーは、正確なフォーカスを実現するための真のエンジンであり、画像の視野全体にさまざまな配列で配置されています。各センサーはコントラストの変化を評価することで相対的な焦点を測定します 画像内のそれぞれのポイント — ここで、最大のコントラストは最大のシャープネスに対応すると想定されます。

| フォーカス量の変更: | ||
| ぼやけ | 部分的 | シャープ |
<表>

400%

センサー ヒストグラム
画像コントラストの背景については、画像ヒストグラムのチュートリアルを参照してください。
注:多くのコンパクト デジタル カメラは、イメージ センサー自体をコントラスト センサーとして使用し (コントラスト検出 AF と呼ばれる方法を使用)、必ずしも複数のディスクリートを備えているとは限りません。オートフォーカス センサー (AF の位相検出方式を使用するより一般的なセンサー)。さらに、上の図はAFのコントラスト検出方式を示しています。位相検出も別の方法ですが、正確なオートフォーカスは依然としてコントラストに依存しています。
通常、オートフォーカスのプロセスは次のように機能します:
(1) オートフォーカス プロセッサ (AFP) により、焦点距離がわずかに変化します。
(2) AFP は AF センサーを読み取り、フォーカスが改善されたかどうか、またどの程度改善されたかを評価します。
(3) (2) からの情報を使用して、AFP はレンズを新しい焦点距離に設定します。
(4) AFP は、満足のいくフォーカスが得られるまで、ステップ 2 ~ 3 を繰り返し繰り返します。
このプロセス全体は通常、ほんの一瞬で完了します。難しい被写体の場合、カメラは十分な焦点を合わせることができず、上記のシーケンスの繰り返しをあきらめ、オートフォーカスに失敗することがあります。これは、フォーカス ロックを達成せずにカメラが前後に繰り返しピントを合わせる、恐ろしい「フォーカス ハンティング」シナリオです。ただし、選んだ被写体にピントが合わないわけではありません。オートフォーカスが失敗するかどうか、およびその理由は、主に次のセクションの要因によって決まります。
オートフォーカスのパフォーマンスに影響する要因
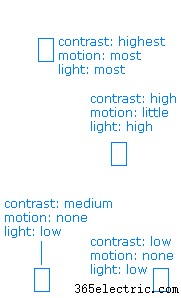
写真の被写体は、カメラのオートフォーカスの精度に大きな影響を与える可能性があり、多くの場合、カメラのモデル、レンズ、またはフォーカス設定の違いよりも大きな影響を与えます。 オートフォーカスに影響を与える 3 つの最も重要な要素は、光量、被写体のコントラスト、カメラまたは被写体の動きです .

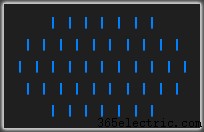
さまざまなフォーカス ポイントの品質を示す例が左に示されています。この画像の上にマウスを移動すると、各焦点位置の長所と短所が表示されます。
これらの要因はそれぞれ独立していないことに注意してください。言い換えれば、薄暗い被写体でも極端なコントラストがあれば、その被写体でもオート フォーカスを達成できる可能性があります。逆の場合も同様です。これは、オートフォーカス ポイントの選択に重要な意味を持ちます。シャープなエッジまたは顕著なテクスチャに対応するフォーカス ポイントを選択すると、オートフォーカスが向上します 、他のすべての要因が等しいと仮定します。
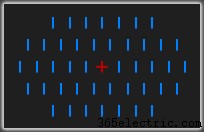
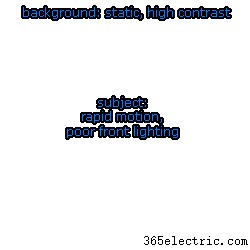
左の例では、幸運なことに、オートフォーカスが最もよく機能する場所が被写体の場所にも対応しています。次の例は、被写体ではなく背景でオート フォーカスが最適に機能するため、より問題があります。下の画像の上にマウスを移動すると、パフォーマンスの良い部分と悪い部分が強調表示されます。


右の写真では、被写体の背後にある動きの速い光源に焦点を合わせた場合、被写界深度が浅い場合に焦点が合っていない被写体の危険性があります (暗い場所でのアクションの場合など)。このようなショット)。
別の方法として、被写体の外側のハイライトに焦点を当てるのがおそらく最善のアプローチですが、このハイライトは移動する光源の位置に応じて側面と強度が急速に変化することに注意してください。
カメラが外部のハイライトに焦点を合わせるのが難しい場合、コントラストが低い (ただし、静止していて適度に明るい) フォーカス ポイントは、被写体の足、または被写体と同じ距離にある地面の葉になります。
ただし、上記の選択を困難にしているのは、これらの決定を予測するか、ほんの一瞬で行う必要があることが多いことです。静止している被写体と動いている被写体にオートフォーカスするための追加の特定のテクニックについては、このチュートリアルの最後にあるそれぞれのセクションで説明します。
オートフォーカス ポイントの数と種類
オートフォーカスの堅牢性と柔軟性は、主に、特定のカメラ モデルで利用できるオートフォーカス ポイントの数、位置、およびタイプの結果です。ハイエンドの一眼レフ カメラは 45 以上のオートフォーカス ポイントを持つことができますが、他のカメラは中央の AF ポイントが 1 つしかない場合があります。オートフォーカス センサーの 2 つのレイアウト例を以下に示します。
| 最大 f/#: | f/2.8 | f/4.0 | f/5.6 | f/8.0 |
 |  | |||
| ハイエンド一眼レフ | ||||
| 最大 f/#: | f/2.8 | f/4.0 | f/5.6 |
| |  | ||
| ミッドレンジ SLR への参入 | |||
左と右の例で使用されているカメラは、それぞれ Canon 1D MkII と Canon 20D です。
これらのカメラでは、f/8.0 と f/5.6 よりも小さい絞りではオートフォーカスができません。
2 種類のオートフォーカス センサーが示されています:
+ クロスタイプ センサー (二次元コントラスト検出、高精度)
l 縦ラインセンサー (一次元コントラスト検出、精度低下)
注:「垂直ライン センサー」は、垂直線に沿ってコントラストを検出するため、単にこれと呼ばれます。
皮肉なことに、このタイプのセンサーは水平線の検出に最適です。
一眼レフ カメラの場合、上図のように、使用するレンズの開放絞りによってもオートフォーカス ポイントの数と精度が変わります。これは、カメラ レンズを選択する際の重要な考慮事項です。レンズを最大絞りで使用する予定がない場合でも、この絞りによってカメラのフォーカス精度が向上する場合があります。 .さらに、中央の AF センサーはほとんど常に最も正確であるため、中心から外れた被写体については、最初にこのセンサーを使用してフォーカス ロックを達成することが最善の方法であることがよくあります (フレームを再構成する前に)。
選択したカメラ設定に応じて、複数の AF ポイントを連携させて信頼性を向上させたり、個別に動作させて特異性を向上させることができます。一部のカメラには、集合写真用の「自動被写界深度」機能もあり、フォーカス ポイントのクラスターがすべて許容可能なフォーカス レベル内にあることを保証します。
AF モード:連続 &AI サーボ vs. ワンショット
最も広くサポートされているカメラ フォーカス モードは、静止している被写体に最適なワンショット フォーカスです。ワン ショット モードは、被写体の動きを予測できないため、動きの速い被写体のフォーカス エラーの影響を受けやすく、ファインダー内でこれらの動いている被写体を視覚化することが困難になる可能性もあります。ワン ショット フォーカスでは、写真を撮る前にフォーカス ロックが必要です。
多くのカメラは、移動する被写体の焦点距離を継続的に調整するオートフォーカス モードもサポートしています。キヤノンのカメラはこれを「AI サーボ」フォーカシングと呼びますが、ニコンのカメラは「連続」フォーカシングと呼んでいます。これは、以前の焦点距離からの被写体の速度の推定に基づいて、被写体が将来どこにいるかを予測することによって機能します。次に、カメラは、シャッター ラグ (シャッター ボタンを押してから露光を開始するまでの遅延) を考慮して、事前にこの予測された距離に焦点を合わせます。これにより、動いている被写体に正確に焦点を合わせる可能性が大幅に高まります。
以下に、さまざまな Canon カメラの最大トラッキング速度の例を示します。
値は理想的なコントラストと照明であり、Canon 300mm f/2.8 IS L レンズを使用します。
上記のプロットは、他のカメラの経験則も提供する必要があります。実際の最大追跡速度は、被写体の動きの不安定さ、被写体のコントラストと照明、レンズの種類、被写体の追跡に使用されているオートフォーカス センサーの数によっても異なります。また、フォーカス トラッキングを使用すると、カメラのバッテリー寿命が大幅に短くなる可能性があるため、必要な場合にのみ使用してください。
オートフォーカスアシストビーム
多くのカメラには、AF アシスト ビームが装備されています。これは、可視光線または赤外線ビームを使用してオートフォーカス センサーが被写体を検出するのに役立つアクティブ オートフォーカスの方法です。これは、被写体が十分に照らされていない場合やオートフォーカスのコントラストが不十分な場合に非常に役立ちますが、AF 補助ビームにはオートフォーカスがはるかに遅いという欠点もあります。
ほとんどのコンパクト カメラは、AF アシスト用に内蔵の赤外線光源を使用しますが、デジタル一眼レフ カメラは、多くの場合、被写体を照らすために内蔵または外部のカメラ フラッシュを使用します。 AF補助光でフラッシュを使用する場合、フラッシュの発光の間に被写体が大きく動くと、AF補助光がピントを合わせにくい場合があります。したがって、AF 補助ビームの使用は、静止している被写体にのみお勧めします。
実践:アクションフォト
オートフォーカスは、AI サーボまたは連続モードを使用している場合、ほとんどの場合、アクション フォトで最高のパフォーマンスを発揮します。レンズが広い範囲の焦点距離を検索する必要がないようにすることで、焦点合わせのパフォーマンスを劇的に向上させることができます。

これを達成するためのおそらく最も広く支持されている方法は、動いている被写体が通過すると予想される場所に近い距離でカメラの焦点を事前に合わせることです。 .右のバイカーの例では、バイカーがその近くを通り過ぎることが予想されるため、道端近くに事前に焦点を合わせることができます。
一部の SLR レンズには、最短焦点距離スイッチもあります。これを可能な限り最大の距離に設定すると (被写体が近づくことはないと仮定して)、パフォーマンスを向上させることもできます。
ただし、連続オートフォーカス モードでは、フォーカス ロックがまだ達成されていなくても、ショットを撮影できることに注意してください。
実際:ポートレートとその他の静止画
静止画は、ワンショット オートフォーカス モードを使用して撮影するのが最適です。これにより、露出が始まる前にフォーカス ロックが確実に達成されます。被写体の動きがほとんどないことを確認する必要がありますが、コントラストと強い照明の通常の焦点要件が引き続き適用されます。
ポートレートの場合、目は標準であり、コントラストが良いため、最適なフォーカス ポイントです。通常、中央のオートフォーカス センサーが最も感度が高くなりますが、中心から外れた被写体に対して中心から外れた焦点を使用すると、最も正確な焦点合わせが実現されます。代わりに中央の AF ポイントを使用してフォーカス ロックを達成した場合 (中心から外れた被写体に対して再構成する前に)、焦点距離は常に実際の被写体距離よりも遅くなり、この誤差は被写体が近づくほど大きくなります。ポートレートは一般的に被写界深度が浅いため、正確なピント合わせはポートレートにとって特に重要です。
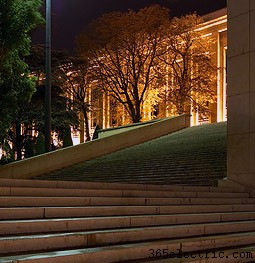
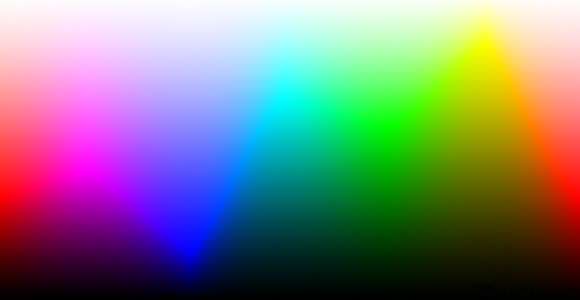
最も一般的なタイプの AF センサーは垂直ライン センサーであるため、フォーカス ポイントが主に垂直または水平のコントラストを含むかどうかも検討する価値があります。暗い場所では、オートフォーカス中にカメラを 90° 回転させることで、他の方法では不可能なフォーカス ロックを実現できる場合があります。
左の例では、階段は主に水平線で構成されています。前景の階段の後ろに焦点を合わせる場合 (過焦点距離を使用して見かけの被写界深度を最大化するため)、オートフォーカス中にまずカメラを横向きモードに向けることで、オートフォーカスの失敗を回避できます。その後、必要に応じて、露光中にカメラを縦向きに戻すことができます。
このチュートリアルでは、フォーカスする *方法* に重点が置かれていることに注意してください。必ずしも *どこに* フォーカスする必要はありません。このトピックの詳細については、被写界深度と過焦点距離に関するチュートリアルをご覧ください。